|
Background/Rationale
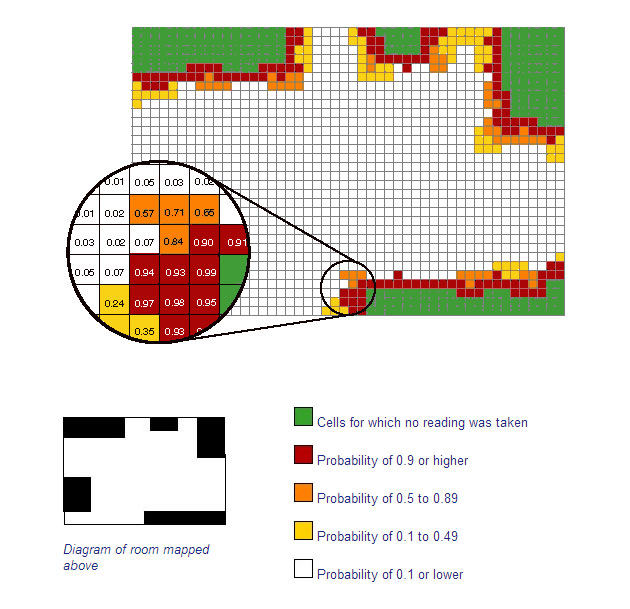
In an effort to provide a more diversified learning environment for its students, the Computing and Mathematical Sciences (CAMS) department of Texas A&M University-Corpus Christi (TAMU-CC) established the real-time computing lab in 1999 with support from the National Science Foundation. The laboratory allows the focused demonstration of key concepts in computer science and mathematics. Students gain hands-on experience in many areas including real-time programming, client/server programming, hardware interfacing, multi-threading, data acquisition and process control. Currently, the primary areas of software development in the lab involve either mobile robots or a digitally controlled model railroad. At any given time, several students are simultaneously writing programs to work with one of these endeavors or extend the functionality of the lab. The model railroad is the most recent area of interest and represents an innovative teaching and public relations tool. Projects are currently underway to enable the trains to be observed and controlled over the Internet, which promises to stimulate interest, pride and prestige in the computer science program. Some students are developing a library of utility functions to control the railway while graduate students are designing the interfaces that will use the library functions. Robotics, another area of great interest at the University, represents a long-term continuing commitment of the CAMS department. The two Pioneer Mobile Robots owned by the University operate on a client/server scheme and have a wide range of capabilities. Their primary sensors are a sonar array and a camera; movement can be precisely controlled, and the robot has an internal compass. The robots can simulate diverse problems in computer science including fuzzy-logic, remote data collection and optimal solutions to problems such as navigation. Like the model railroad, the robotics lab is managed in a way to facilitate several students developing projects which will eventually interlock. A previous graduate project was the development of a program to autonomously navigate the robot around obstacles to a destination point. Building off this software, ideas for future development could be a program that would determine an optimal path between two points or recognize and distinguish between the many obstacles. The functionality of the robot is dependent upon the existence of library functions built upon and expounded by the work of many students. The development of a mapping program for the mobile robots is both a natural extension of the ability to navigate the robot and a necessary intermediate step for future projects. For example, obtaining the optimal path from one point to another requires application of a cost function to evaluate the performance of the possible routes. Identification of each possible solution relies upon knowledge and analysis of the location of obstacles. This data will be obtained by the mapping agent. The essential function of a robotic device is to interact with the surrounding environment, for which an accurate perception of that environment is fundamental. The robot’s problem of exploring would be fairly simple if it possessed either a previously derived map or a reliable method of precision location. The problem of exploring in unison with mapping poses substantial problems, which have been described and labeled in many ways including simultaneous localization and mapping (SLAM) or concurrent localization and mapping (CLM). A mapping agent usually accomplishes its work through either of two major paradigms of spatial modeling. One is based on landmark recognition, and the other utilizes an occupancy grid. Feature-based methods used to build topological maps are based on trilateration, which is the determination of position based on distance measurements to unique landmarks. This method is immensely useful when using active beacons as landmarks such as the Global Positioning System (GPS). Stereo vision based mapping systems often employ landmark methods because of sensor resolution and range. A major advantage of topological maps is they tend to be compact; the resolution is based upon complexity of the environment. Moravec and Elfes pioneered the occupancy grid method. Occupancy grids are two- or three-dimensional arrays that represent the mapped environment. Every array grid cell, representing a precise geometric area or volume, stores the current probability that the cell is occupied. Figure 1 visually represents an occupancy grid. A grid-based approach is easier to build and maintain when compared to topological maps. It can use multiple types of sensors but is ideal for sonar sensors. The spatial geometry is explicit and view-independent. This approach requires accurate determination of location and orientation of the robot. It is not compact and resolution is fixed by grid cell size. Both methods of spatial modeling are confined by the physical capabilities of the robotic equipment. Sensors used by the majority of current robots are limited in number, capability and accuracy as well as prone to all of the inherent physics problems of a dynamic world. Figure 1. Occupancy Grid Representation of a Room |
Ultrasonic range finders are frequently inaccurate due to spurious noise spikes and reflectivity problems. Optical sensors have problems with bandwidth, spherical aberration and interference. Because of these sensor inconsistencies, a robot cannot be certain about anything it perceives. This uncertainty defines and distinguishes robotic applications from other programming. The concept is so fundamental that a programming methodology, known as probabilistic robotics, has been proposed. Evaluating something the robot believes or perceives requires a statistical sample of readings. The direct consequence of this uncertainty is a higher level of computational complexity. Often a trade-off is made balancing computational speed with certainty.
The general idea of this project will have greater significance than simply moving a small robot. Uses for robotic technology range from scientific data collection where human life or delicate ecology would be endangered to use in deep-sea investigation and artifact recovery. Real-world applications using this type of program include the following:
The general idea of this project will have greater significance than simply moving a small robot. Uses for robotic technology range from scientific data collection where human life or delicate ecology would be endangered to use in deep-sea investigation and artifact recovery. Real-world applications using this type of program include the following:
- At the University level, one vision in the early stages of planning is a small floating watercraft capable of collecting data in bays and estuaries. The main idea is less disruption to the environment being studied; a small, autonomously controlled machine will be less intrusive than a manned expedition, which has a greater possibility of upsetting the habitat. Locally, an element of the environment most easily upset by intrusive observation is the ecology of fragile seagrasses, the loss of which makes the area more vulnerable to erosion. The tiny research station will navigate to a desired location, gather samples and measurements, and report its findings. To accomplish this task, the craft must be able to find its location, know where its next point of research will be, determine the relative location of obstacles in its path, and move to its new coordinates.
- At Chernobyl, a robotics “dream team” including Carnegie Mellon University and Silicon Graphics Incorporated (SGI) is working to map the deterioration of the sarcophagus encasing the failed nuclear reactor. , They are creating a 3D virtual reality map to aid in stabilization and remediation of the structure to prevent another severe radiation accident.
- An interesting application of robotics has been performed recently in Antarctica. Nomad is a robot designed specifically to search for meteorites. It contains sensors for classification of meteorite samples, an application of robotics very similar to mission requirements of exploring Mars or other planetary surface. Nomad is faced with the problem of simultaneously mapping and localizing. To establish the current position, it uses a landmark-based navigation system.
- Robotic spacecraft have recently mapped Mars and Venus, our closest celestial neighbors. The Magellan spacecraft’s primary mission was to map the surface of Venus with synthetic aperture radar (SAR). The Mars Global Surveyor performed a similar task on Mars.
- A deep-sea computerized robot named Jason aided with the recovery of artifacts from shipwrecks in 2,000 feet of water. The ROV recovered 115 items including fragile glass objects.
